Inverse Kinematics Solver
The master course Motion and Manipulation, focused on motions and rotations in 3D space. The final project was to program inverse kinematics of an index finger.
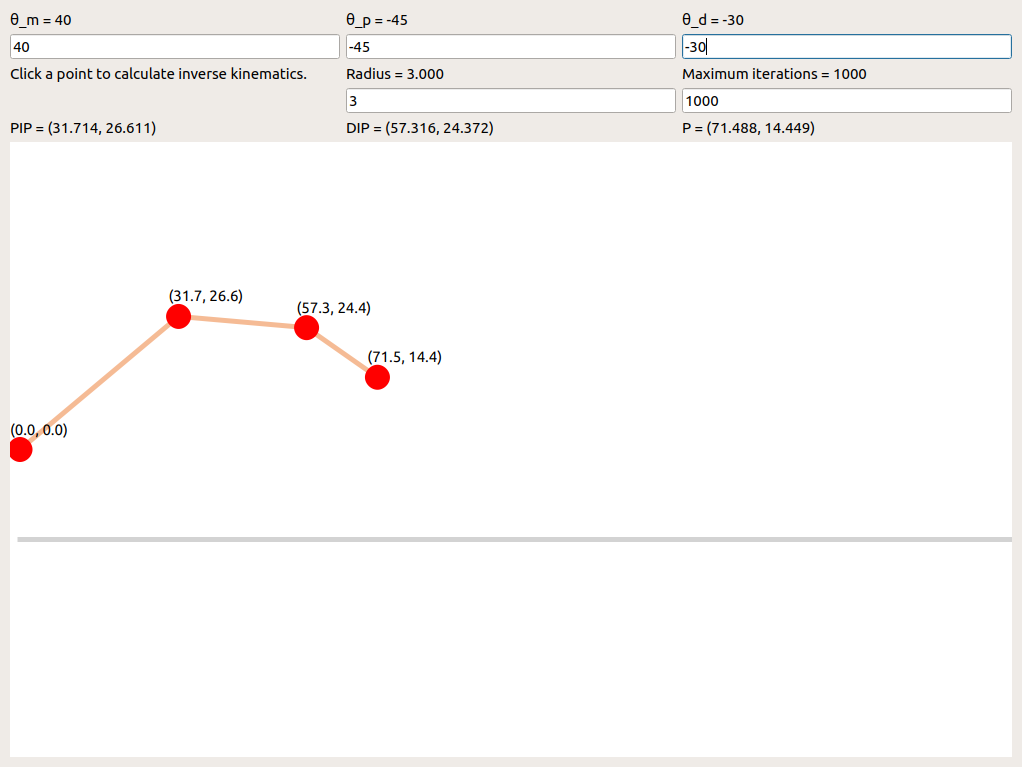
I programmed the inverse kinematics solver in C++. The user clicks somewhere on the screen where the fingertip needs to be, and it will be there as close as possible while the angles of the rest of the finger are in a realistic range.